
Autonomer Roboter zur selektiven Spargelernte
AvL Motion betritt neues Terrain – mit einer Maschine zur selektiven Ernte von weißem Spargel, gespickt mit hochpräziser Sensorik sowie RFID- und Feldbustechnik von Turck
Das niederländische Start-up AvL Motion hat eine Maschine zur vollautonomen, selektiven Ernte von weißem Spargel auf den Markt gebracht. Auf der Suche nach einem Ultraschallsensor zur Höhenregulierung stieß das Unternehmen auf den IO-Link-fähigen RU40U von Turck. Die darauf folgende Zusammenarbeit brachte weitere Sensortechnik ins Fahrzeug, darunter induktive Näherungsschalter im Kleinformat, präzise Drehgeber sowie LE550-Lasersensoren von Banner Engineering und den robusten Linearwegsensor Li500-Q25. Zur Identifikation von Erntemodulen setzt AvL zudem auf den RFID-Schreib-Lese-Kopf TN-Q14, während das kompakte I/O-Modul TBEN-S2-4IOL IO-Link-Signale an die SPS überträgt.
-turck-image.jpg)
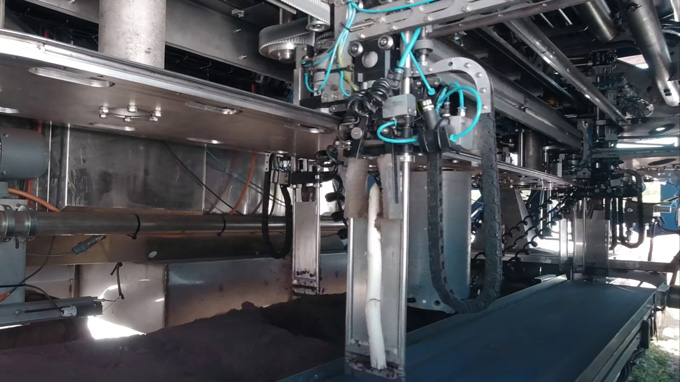
Auf Knopfdruck: Der AvL Compact S1560 zieht Spargelstangen selbstständig aus der Erde

An Bord der Maschine befinden sich sechs bis zwölf Erntemodule

AvL-Gründer Arno van Lankveld nutzt Turcks IO-Link-Ultraschallsensor RU40U

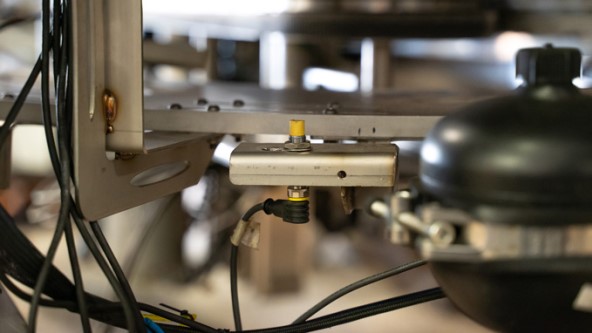
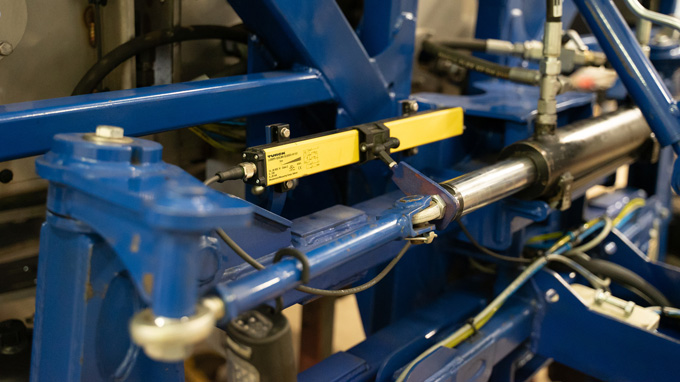
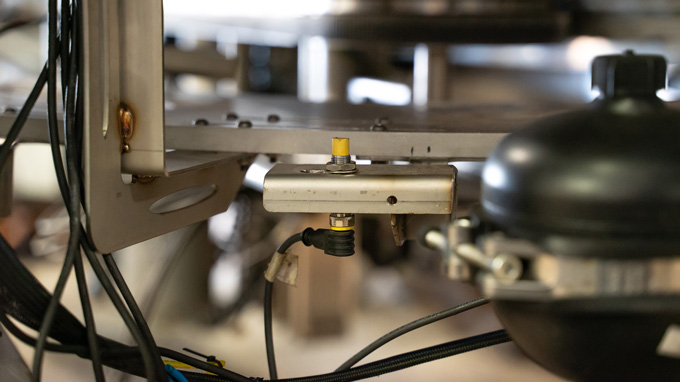
Der robuste Li500-Q25 in IP67 kann auch außen, oberhalb der Vorderachse, montiert werden

Im Pufferbereich erfassen BI3-M08K-Sensorwinzlinge die Anzahl der verfügbaren Erntekassetten
Passiert eine Kassette den Sensor NI10U-M12, startet die SPS den Timer eines Erntevorgangs

Turck-Drehgeber melden, an welcher Position des Puffers momentan ein Erntemodul bereitsteht

Ein Mitarbeiter verpackt den Spargel in Kisten und hat zugleich die Kontrolle über den Ernteroboter

Das kompakte TBEN-S2-4IOL dient als Schnittstelle zwischen Sensoren und SPS
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Höhenregelung über Ultraschallsensor mit IO-Link
AvL Motion verwendet zwei der Ultraschallsensoren RU40U mit IO-Link, um die Distanz zwischen Beet und dem pneumatisch regulierbaren Innenrahmen der Maschine zu messen. Trotz teilweise staubigem oder regennassem Untergrund ermöglicht der Sensor eine stabile Bestimmung der Höhe, die Anwender auf einem HMI vorgeben können. „Turck hat uns mit sehr guter Qualität und einer schnellen Lieferung überzeugt. Deswegen sind wir auch für andere Komponenten bei dem Hersteller geblieben“, sagt AvL-Geschäftsführer Arno van Lankveld.
Optisches Verfahren ersetzt geübten Blick
Der Ernteprozess des AvL Compact S1560 läuft hochdynamisch. Ist die Maschine einmal positioniert und in Bewegung gesetzt, beginnt zunächst das Absuchen der Erdoberfläche. Wo genau ein Spargelkopf herausragt, erfährt die Hauptsteuerung von Lasersensoren, ergänzt durch ein weiteres optisches Verfahren. Entlang eines Rundlaufs bewegt sich derweil im Inneren des Roboters eine variable Anzahl von Erntemodulen, derzeit sind es zwölf der etwa 25 Zentimeter hohen Kassetten. Sie sind an die Fahrgeschwindigkeit angepasst und beherrschen den gesamten Vorgang aus Stechen, Schneiden und Greifen.
Feinabstimmung zwischen Target und Erntemodul
Zur Feinabstimmung des Erntevorgangs benötigt die Steuerung nicht nur die Koordinaten der anvisierten Spargelstangen, sondern auch permanent Informationen über Position sowie Bewegung der Module. Dies beginnt mit der Abfrage, wie viele Kassetten sich momentan im Puffer befinden, dort also in Parkposition stehen und bei der Detektion einer Spargelsprosse in den Rundlauf geschickt werden können. AvL nutzt dafür die winzigen induktiven Sensoren BI3-M08K. Die genaue Identifikation der Erntemodule erfolgt über RFID – mit Hilfe des HF-Schreib-Lese-Kopfs TN-Q14, der jeweils den individuellen Code einer Kassette ausliest. Hinzu kommt eine Positionsbestimmung durch Drehgeber.
Induktiver Sensor triggert einen Timer
Wird dann der Rundlauf eines Erntemoduls gestartet, passiert dieses einen uprox-Näherungsschalter vom Typ NI10U-M12, der in der SPS den Timer für einen Ernteprozess in Gang setzt. Da Spargelstangen nicht in Reih und Glied wachsen, können sich die Erntemodule zusätzlich zum Rundlauf auch nach links und rechts bewegen. Dies geschieht über Druckluft und daher stets wenige Zehntelsekunden verzögert. Damit sich die Kassetten dennoch präzise ausrichten, erhält die SPS Informationen über den Abstand zwischen Ausgangs- und Zielposition der Module, gemessen mit LE550-Lasersensoren von Turcks Optoelektronik-Partner Banner Engineering.
Wendemanöver per Joystick
Einfluss auf die Geschwindigkeit und die hydrostatische Lenkung der Erntemaschine haben Bediener über ein externes Steuermodul. Zwei Turck-Encoder messen die Radumdrehungen; das Erfassen der Radpositionen löst AvL über eine induktive Linearwegmessung. Der Positionsgeber des Sensors LI500-Q25 ist dafür mit dem Kolben des Lenkzylinders gekoppelt. So berechnet die Hauptsteuerung über nur einen Wert die Winkel beider Räder – und Bediener können die Maschine komfortabel per Joystick wenden. Anders als bei Wettbewerbsmodellen müssen Landwirte den AvL Compact S1560 dazu nicht an einen Traktor hängen.
Weitere Informationen
- Video (YouTube): Der erste voll-autonome Ernteroboter für weißen Spargel
- Auf einen Blick: Encoder-Portfolio für zahlreiche industrielle Anwendungen
- Link zum Produkt: Ultraschallsensor RU40U-M18E-LIU2PN8X2T-H1151
- Link zum Produkt: Induktiver Sensor BI3-M08K-AP6X-V1131
- Link zum Produkt: Induktiver Sensor NI10U-M12-AP6X-H1141
- Link zum Produkt: Induktiver Linearwegsensor LI500P0-Q25LM0-LIU5X3-H1151
- Link zum Produkt: Laserabstandssensor LE550IQ
- Link zum Produkt: Laserabstandssensor mit IO-Link LE550KQ
- Link zum Produkt: HF-RFID-Schreib-Lese-Kopf TN-Q14-0.15-RS4.47T
- Link zum Produkt: Kompaktes Multiprotokoll-I/O-Modul TBEN-S2-4IOL
- Gesamten Artikel herunterladen – more12050 [PDF, 1,31 MB]
- Automobil
- Modulare Flexibilität und Sicherheit in der Filterproduktion
- Intelligente Leitung verhindert Anlagenstilltände
- Induktive Koppler sichern präzise Materialzufuhr
- Montageführung mit direkter MES-Anbindung
- Karosserie-Identifikation in der Automobilproduktion
- Zuverlässige Skid-Erfassung in der Automobilproduktion
- Fehlerfreie JIS-Kommissionierung von Stoßfängern
- Erkennung von Blechzylindern in der Batterieproduktion
- RFID-Bus-Modus sichert die Qualität von Lithium-Ionen-Akkus
- Füllstandmessung in Tauchlackieranlage
- Füllstandkontrolle in Zentralschmieranlage
- Qualitätssicherung am Kleberoboter
- Neigungswinkelsensor beschleunigt Plattformausrichtung
- Motorsteuerung mit Condition Monitoring
- IP67-Hybrid-Modul verarbeitet Sicherheitssignale
- Dezentrale Überwachung von Kühlstationen
- Roboterschweißzellen mit Ethernet vernetzt
- Kühlkreislauf-Monitoring an Schweißzangen
- Strömungsüberwachung im Trommelwäscher
- Presswerk – Blechdickenmessung
- Condition Monitoring von Motoren als Nachrüstung
- KSS-Überwachung an CNC-Fräsen
- Presswerk – Werkzeugidentifikation
- Karosseriebau – Schweißmuttern-Erkennung
- Lackierung – Skid-Identifikation
- Endmontage – Robotermontage
- Powertrain – Kontaktlose Kontrolle
- Karosseriebau – Bereichsschutz
- Erfassung auf Item-Level mit UHF-RFID
- Kühlschmierstoffzufuhr in Werkzeugmaschinen
- Presswerk – Kontrolle des Hydraulikdrucks
- Prozessdruckmessung am Scherenhubtisch
- Karosseriebau – Inspektion der Kfz-Schweißspitze
- Karosseriebau – Manuelles Laden der Schweißzelle
- Endmontage – Erkennung von schwarzen Teilen
- Endmontage – Sonnendacherkennung
- Endmontage – Reichweitenstarke Prüfung
- Powertrain – Unterlegscheiben-Erkennung
- Powertrain – Positionserkennung
- Erfassung von Elektroautos
- Fahrzeugerkennung an Autowaschanlagen
- Success Stories
- RFID-Lösung zur Datenerfassung in der Statorproduktion
- Automatisierung und Steuerung von Wasserstofftankstellen
- Modulare Anlage für flexible und effiziente Produktion
- Lasersensor erkennt schwarze Stoßfänger in Montagezelle
- Dezentrale Sicherheitstechnik für modulare Produktion
- Modulares Fördersystem
- RFID und I/O-Module für einen sicheren Werkzeugwechsel
- RFID leitet AGV in der Federsystem-Produktion
- IO-Link-Passivverteiler verdrahten Auspuffproduktion
- Identifikation in der Heckentlüftungsproduktion
- Schweißmutternsensor
- Karosserie-Identifikation
- Bauteilzuordnung mit RFID
- UHF-RFID in der Stoßfängerproduktion
- IP67-Block-I/O in der Lackierstraße
- Näherungsschalter für präzises Schweißen
- Winkelsensoren sichern Sitzmontage
- Fräskopfidentifikation mit RFID
- Pick-to-Light-System verbessert Cockpit-Montage
- RFID-Identifikation von Einspritzdüsen
- UHF-RFID im Rohbau
- IO-Link erleichtert Getriebeproduktion
- Chemie
- I/O-System excom schafft sichere Wasserstoffverflüssigung
- Dezentrale Automatisierung in explosionsgefährdeten Bereichen
- RFID-Kontrolle von Schlauchverbindungen im Ex-Bereich
- Ethernet-Signalanbindung im MSR-Raum
- Modulare Skids im Ex-Bereich mit Ethernet automatisieren
- Ex-Trennung in modularen Prozessanlagen
- Erfassung von Molchen
- Dezentrale Signalverarbeitung
- Anschluss von Feldgeräten
- Signalverarbeitung mit System-I/O im MSR-Raum
- Signalverarbeitung mit Interfacetechnik im MSR-Raum
- Identifikation von Schlauchanschlüssen
- Zustandsüberwachung von Schaltkästen im Feld
- Schwenkantrieb-Überwachung
- Planung und Bau von Systemlösungen
- Success Stories
- Schaltschrankwächter zur Übertragung von Zustandsdaten
- Silofüllstände dank Sensor-to-Cloud in Echtzeit erfassen
- Effiziente Kühlung von Industrieöfen
- I/O-System excom schafft Platz im MSR-Raum
- RFID für Staub-Ex-Zone 22
- Pflanzenidentifikation mit RFID
- Remote-I/O statt Punkt-zu-Punkt
- excom Remote-I/O an Yokogawa Centum VP
- Remote-I/O ersetzt 19''-Karten
- Stellungsrückmeldung von Kugelhähnen
- Multibarriere sichert galvanische Trennung
- Remote-I/O sichert Anlagenverfügbarkeit
- Korrekte Positionierung mit RFID in der Karbidproduktion
- Kompakter Ex-Schutz
- Energie
- Kapazitiver Sensor erfasst Grenzstand in Pelletheizung
- RFID-System identifiziert Solarzellenträger
- Dezentrales I/O-System für explosionsgefährdete Bereiche an H2-Tankstellen
- H2-Tankstelle mit dezentralem I/O-System für Ex-Bereiche
- I/O-Module erleichtern Mobilität von Brennstoffzellen-Teststand
- Näherungsschalter sichern Rotorstellung
- IP67-Gateway im Kohlekraftwerk
- UHF-RFID identifiziert Ringkabelanlagen
- Remote-I/O in Biogas-Anlage
- Lebensmittel
- RFID-Tracking reduziert Abfall in Lebensmittelproduktion
- Condition-Monitoring-Sensor automatisiert Klimaregulierung
- Condition Monitoring von Schaltschränken
- Condition Monitoring in Lagerräumen
- Höhenregelung in Teigmaschinen
- Identifikation von Transportbehältern
- Behälterkontrolle
- Schneller Sensortausch in Getränkeproduktion
- Erfassung von Rohrbögen
- Identifikation von Schokoladenformen
- Success Stories
- Cloud-Fernwartung für Dampferzeuger
- RFID-System schafft Track & Trace in der Lebensmittelproduktion
- Zuverlässige Linearwegerfassung in Ex-Zone 22
- Dezentrale Steuermodule in Kühlhaus
- Track and Trace in der Fleischproduktion durch RFID
- Berührungsloser Drehgeber in der Kartoffelverarbeitung
- UHF-RFID im Logistikzentrum für Nahrungsmittel
- RFID in der Schokolade-Produktion
- IP20-Gateway in der Großbäckerei
- Remote-I/O für Whiskey-Distillerie
- RFID in Autoklaven
- IP67-Netzgerät am Stauförderer
- Flaschenerkennung durch Kamera
- Logistik
- UHF-RFID-Tunnel zur Identifikation von Waren auf Förderbändern
- Vermeidung von Paket-Stau im Logistikzentrum
- Höhenkontrolle und 3D-Raumerfassung an autonomen Gabelstaplern
- Dezentrale Steuerung von Fördertechnikmodulen
- Big Bags mit RFID verfolgen
- Distanzerfassung an Containerbrücken
- Zutrittsicherung für geschützte Bereiche
- Dezentrales Muting einer optischen Schutzeinrichtung
- I/O-Blocks steuern Rollenfördermodule
- Behälterkontrolle
- Schnelle Datenträger-Erfassung an Gates
- Erfassung auf Item-Level mit UHF-RFID
- Vorausschauende Wartung an Förderbändern
- Erfassung von Transport-Behältern
- Füllstanderfassung in Behältern
- Identifikation von Cryovessels
- Identifikation von mobilen Behältern durch Handgeräte
- Identifikation von Transportbehältern
- Tier 1 – Stoßfängeridentifikation
- Condition Monitoring in Lagerräumen
- Kollisionsschutz am Greifstapler
- Success Stories
- Kommissionierung mit Pick-to-Light-System
- Digitalisierung von Fördertechnik
- Logistik: RFID reduziert Fehlerquote um 99 Prozent
- RFID: ROI nach drei vermiedenen Lieferfehlern erreicht
- Zuverlässige FTS-Steuerung dank sensorbasierter Gesamtlösung
- Effiziente LKW-Navigation auf begrenzter Manövrierfläche
- Nachhaltiges Erfassen von Mehrwegladungsträgern dank RFID
- RFID-Lösung für fehlersichere Materiallogistik
- RFID mit HF-Busmodus vereinfacht Saatgut-Lagerung
- Pick-by-Light beschleunigt manuelle Logistik um über 60 Prozent
- Pick-by-Light-Lösung erleichtert Montageprozesse
- RFID ermöglicht automatisierten Selbstbedienungsmarkt
- I/O- und Safety-Module erhöhen Durchsatz in der Intralogistik
- Sendungsverfolgung für Zulieferprodukte
- RFID-basierte Verladekontrolle minimiert Fehler
- RFID-gestützte Erfassung von Warenein- und -ausgang
- Dezentrale UHF-RFID-Lösung
- Berührungsloser Drehgeber in der Kartoffelverarbeitung
- Dezentrale Steuermodule in Kühlhaus
- Geschwindigkeitskontrolle durch Radarsensor QT50
- IP67-Netzgerät am Stauförderer
- Modulares Fördersystem
- RFID im Lagermanagement
- RFID leitet AGV in der Federsystem-Produktion
- RFID identifiziert Pharmazeutika
- UHF RFID im Logistikzentrum für Nahrungsmittel
- Autonome Einparkhilfe für LKW
- Mobile Arbeitsmaschinen
- Tier- und Objekterkennung am Mähdrescher
- Condition-Monitoring-Sensor automatisiert Klimaregulierung
- Automatischer Hangausgleich
- Verteilerleitungen für Feldspritzen
- Winkelmessung an einer Feldspritze
- Materialflussüberwachung im Mähdrescher
- Bestimmen der Aufbauposition am Mobilkran
- Geräteraumbeleuchtung am Löschwagen
- Zweiachsige Neigungsmessung am Mähdrescher
- Kollisionsschutz am Greifstapler
- Success Stories
- RFID-Lösung unterstützt smarte Gabelstapler
- Sichere Fernwartung von Be- und Entwässerungspumpen
- Zugangskontrolle mit RFID-System
- Selektiver Spargelernte-Roboter
- Positionserfassung mit RFID und Drehgeber
- Geschwindigkeitskontrolle durch Radarsensor QT50
- RFID leitet AGV in der Federsystem Produktion
- Block-I/O-Module auf Superyacht
- Verschleißfreier Encoder auf Hopperbagger
- IP20-I/O-Stationen im Schuttguthafen
- Durchflussüberwachung in E-Lok
- Anschlusslösung für E-Mobil
- Anschlusstechnik in Schneepflügen
- IP67-Gateways in Portalkränen
- Drucksensoren an Spezialkränen
- Näherungsschalter sichern Achterbahnen
- Feldbustechnik für Baustoffmaschine
- Linearwegmessung am Rundfahrgeschäft
- Neigungssensor am LKW-Kipptisch
- Winkelsensor erfasst Hubarbeitsbühne
- Öl und Gas
- Verpackung
- Dezentrale Packungsverifikation für Pharmaprodukte
- Identifikation von Druckfarben-Kartuschen
- Zuverlässiger Maschinenbetrieb
- Behälterkontrolle
- Deckelkontrolle an Abfüllanlagen
- Überprüfung von Formatwechseln
- Identifikation von Testflaschen
- Füllstandkontrolle von Kaffee
- Füllstanderfassung in Behältern
- Erfassung von Transport-Behältern
- Success Stories
- Pharma
- Lückenlose Probenverfolgung mit RFID
- RFID-Kontrolle von Schlauch-verbindungen im Ex-Bereich
- Dezentrale Packungsverifikation für Pharmaprodukte
- Modulare Skids automatisieren
- Pharma-Skids mit dezentraler I/O-Technik
- Ex-Trennung in modularen Prozessanlagen
- Ventilanschaltungen steuern
- Schwenkantrieb-Überwachung
- Erfassung von Rohrbögen
- Dezentrale Signalverarbeitung
- Planung und Bau von Super Skids
- Anschluss von Feldgeräten
- Identifikation von Cryovessels
- Identifikation von mobilen Behältern
- Identifikation von mobilen Behältern durch Handgeräte
- Sicherung von Schlauchverbindungen für Vorprodukte
- Identifikation von Schlauchverbindungen im Sterilbereich
- Identifikation von Big Bags und Bioreaktoren
- Identifikation von Single-Use-Applikationen
- Success Stories
- Überprüfung von Schlauchanschlüssen mit RFID
- Berührungslose Übertragung von Leistung und Schaltsignalen
- HMI steuert industriellen Labormischer
- BL20-Codesys-Gateway steuert Bildverarbeitungsanlage
- RFID identifiziert Pharmazeutika
- Magnetfeldsensor erfasst Drehzahl von Mischköpfen
- Prozesssichere Identifikation von Flüssigkeiten
- Halbleiter
- Überprüfen von Teilekennzeichnungen
- Integrierte Schaltungen zählen
- Überprüfung von Barcodes
- Safety Controller überwacht Geräte an Montagestation
- Prüfung von Kleberaupen
- Detailkontrolle mobiler Elektronikgeräte
- IC-Chips in Lochstreifentaschen
- Positionskontrolle von IC-Chips
- Festplatten-Erfassung
- Lichtgeführtes Kommissionieren
- Statusanzeige von Beschichtungsvorgängen
- Sicherung kleinerer Betriebs- und Zugangspunkte
- Success Stories